

- 00000018WIA30088970GYZ
- id_400264381.4
- May 23, 2022 2:26:05 AM
MR-Touch
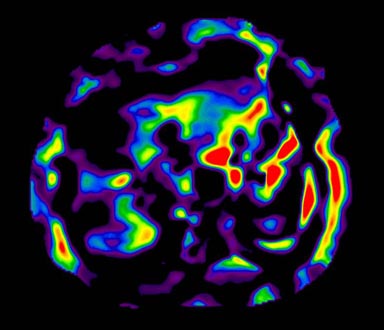
READY View MR-Touch is a post process of an MR-Touch acquisition, which is a Phase Contrast (PC) application that generates an image contrast related to the shear stiffness of soft tissue.
Indications for use
MR-Touch is a software and hardware option intended for use with GE MR systems. It is indicated for magnetic resonance imaging of the human body in adults.
MR-Touch generates transverse sectional information related to the relative stiffness of soft tissue. It consists of hardware as well as acquisition and reconstruction software. The hardware components induce vibrations into the scan subject. The MR-Touch acquisition software is an evolutionary improvement to the GRE (1.5T) sequence. The sequence synchronizes the induced vibrations to acquire a series of phase-contrast images over time. The phase-contrast imaging technique measures motion or displacement. The displacement from the induced vibrations is detected using the time-series of phase-contrast images. The displacement information is reconstructed and presented as strain wave and relative stiffness images.
When used with a GE MR system, MR-Touch is capable of producing transverse images of internal body structures such as muscle and liver.
When interpreted by a trained physician, these images may provide information that can be useful in determining a diagnosis.
Considerations
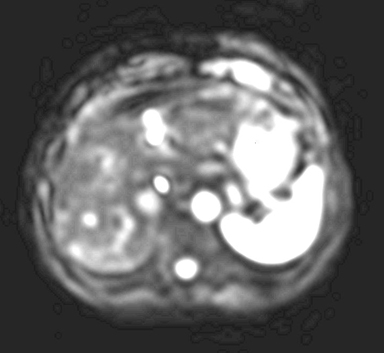
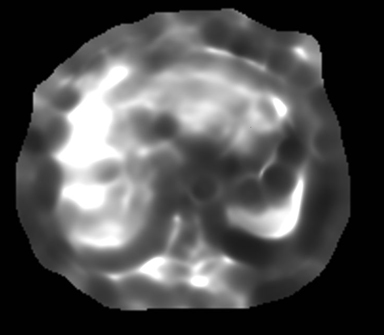
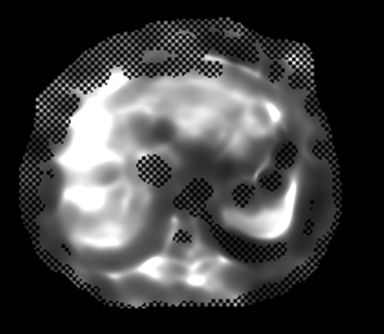
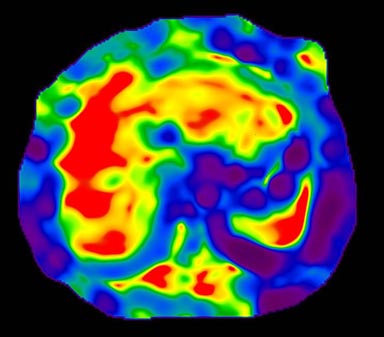
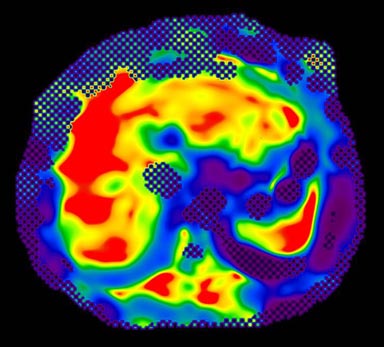
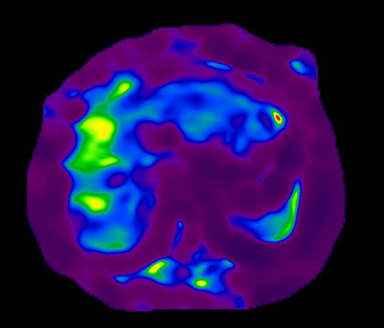
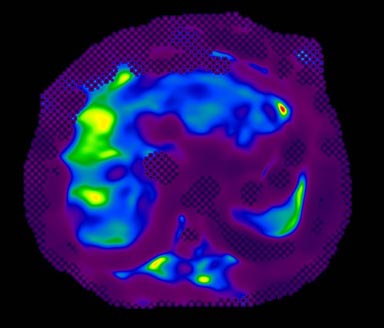
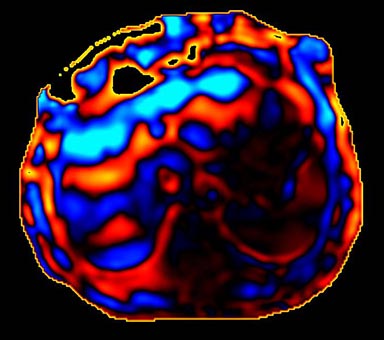
MR-Touch acquisition generates the following image types: magnitude, phase maps, wave maps, and an attenuation map. Six relative stiffness images are reconstructed for each slice location. The relative stiffness images are reconstructed in color and grey scale, and in masked and un-masked versions. Mask portion is depicted as a checkerboard pattern on the image. It is created to identify regions that should not be included in ROI measurements.
| Image map | Image map |
|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
MR-Touch measurement units
The MR-Touch functional maps have the following units of measurement.
| Maps | Units |
|---|---|
| MR Touch-Elastogram | Pa |
| MR-Touch-Wave Images | mm |
| MR-Touch-Elastogram + Mask | Pa |
| MR Touch-attenuation | 1/m |
READY View protocols that use MR-Touch scan data
- MR-Touch
- MR Liver